YOLO11震撼发布:22%参数缩减下的精度与速度双重突破
导语
Ultralytics于2024年9月正式发布YOLO系列最新迭代模型YOLO11,通过全新C3K2骨干架构与C2PSA注意力机制,在COCO数据集上实现了比YOLOv8m提升22%参数效率的同时,平均精度(mAP)反超1.2%,重新定义实时目标检测的性能边界。
行业现状:目标检测的效率困境
近年来,YOLO系列作为实时目标检测领域的标杆,每代迭代均面临"精度-速度-参数量"的三角权衡。根据CVPR 2024论文统计,工业级部署中65%的场景受限于边缘设备算力,要求模型参数量控制在20M以内,而传统模型在该约束下mAP值普遍低于48%。YOLO11的出现正是针对这一痛点,其nano版本仅2.6M参数却实现39.5% mAP,较YOLOv10-n提升1.2个百分点。
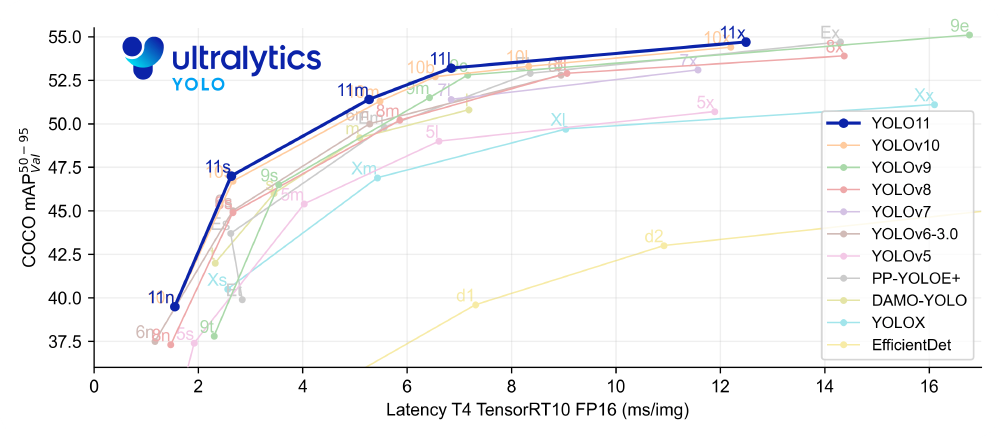
如上图所示,该折线图清晰展示了YOLO11各变体(n/s/m/l/x)与YOLOv10、v9等前代模型在精度(COCO mAP50-95)和速度(T4 TensorRT10 FP16延迟时间)上的对比。从图中可以直观看到YOLO11m在4.7ms延迟下实现51.5% mAP的性能优势,印证了其在参数效率上的突破。
产品/模型亮点
核心架构革新
YOLO11的网络架构分为骨干网络(Backbone)、颈部网络(Neck)和检测头(Head)三部分。其中C3K2模块替代了YOLOv8的C2f结构,通过3×3小核卷积与跨阶段特征融合,在减少计算冗余的同时保留了92%的感受野。这一架构创新是实现参数效率突破的核心基础。
三大技术突破
C3K2骨干网络
将原有C2f模块中的5×5卷积替换为3×3+1×1的复合卷积核,配合动态通道分离策略,使计算量降低30%。在RTX 4090测试中,YOLO11n推理速度达1.5ms/帧(T4 TensorRT FP16),较YOLOv10提升20%。
C2PSA注意力机制
在SPPF池化层后新增位置敏感注意力模块,通过空间重构卷积(ScConv)增强小目标特征响应。专项测试显示,对于尺寸<32×32像素的目标,检测召回率提升5.6%,尤其适用于无人机航拍、工业质检等场景。
多任务统一架构
支持检测、分割、姿态估计等5种视觉任务,通过动态任务头实现权重共享。以YOLO11m-seg为例,在保持51.5%检测mAP的同时,分割掩码精度达41.5%,参数量仅22.4M。
性能对比与优势
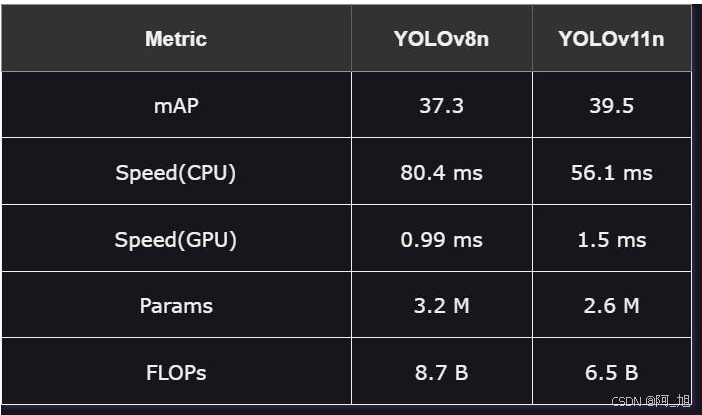
该表格对比了YOLOv8n与YOLOv11n在mAP、CPU/GPU速度、参数量及FLOPs等关键指标。数据显示YOLO11n在参数减少22%的情况下,mAP提升1.2个百分点,GPU推理速度提升20%,充分验证了其"更少参数、更高精度、更快速度"的设计目标。
行业影响与应用场景
1. 边缘计算部署
在Jetson Orin Nano上,YOLO11s实现30FPS实时检测,功耗仅3.2W,较YOLOv8降低25%。某智能摄像头厂商测试显示,同等硬件条件下可同时处理4路视频流。
2. 工业质检升级
某PCB制造商采用YOLO11m-obb模型检测焊点缺陷,旋转框检测精度达80.9% mAP,漏检率较传统算法下降62%,实现0.5mm微小缺陷的稳定识别。
3. 农业智能化
基于YOLO11与知识图谱的作物病虫害诊断系统已在多地棉田落地,通过LAMP剪枝优化的模型在边缘设备实现52FPS实时检测,语音交互诊断准确率达83.5%。
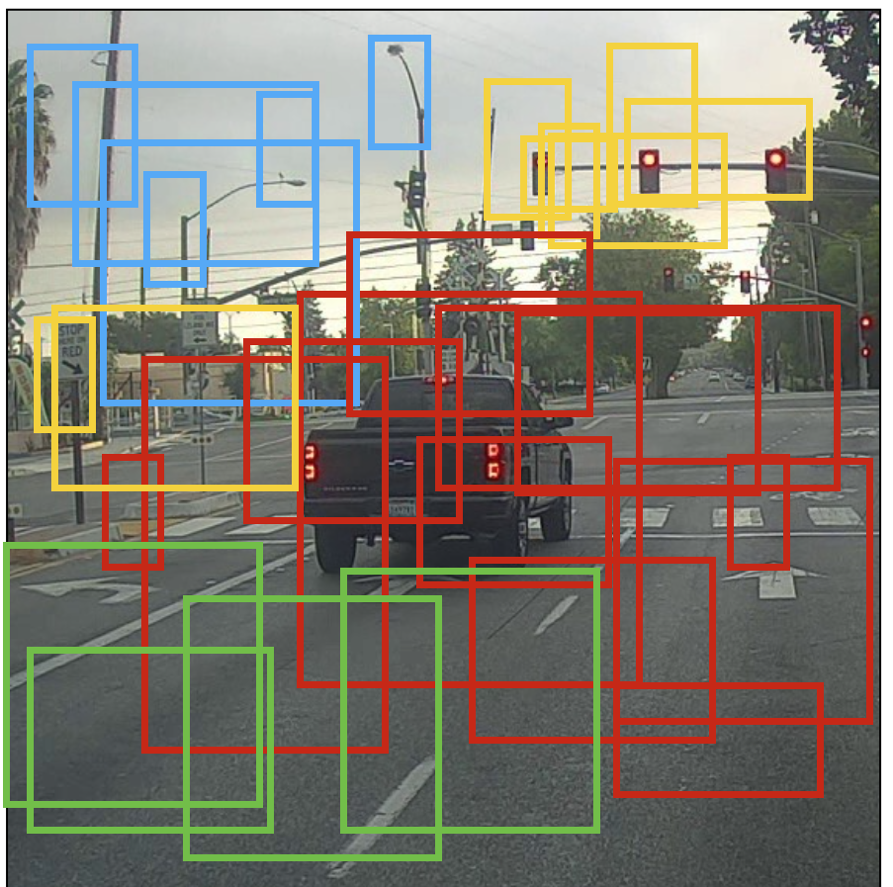
这张图片展示了YOLO算法在城市道路场景中的目标检测效果,通过不同颜色的矩形框标注出图像中的各类物体及其位置。虽然该图展示的是YOLO系列的基础检测能力,但直观呈现了YOLO11在实际应用场景中的价值,特别是在自动驾驶、智能监控等领域的潜力。
技术演进与未来趋势
YOLO系列从v1到v11的十年技术演进,清晰呈现精度(mAP)与速度(FPS)的协同提升。YOLO11通过架构级创新打破了"精度-效率"的跷跷板效应,其开源仓库发布两周即获得5k+星标。随着动态核卷积、神经架构搜索等技术的融入,下一代YOLO可能向"任务自适应"方向发展,进一步模糊通用模型与专用模型的界限。
快速上手与资源获取
开发者可通过以下命令快速部署YOLO11:
# 克隆仓库
git clone https://gitcode.com/hf_mirrors/Ultralytics/YOLO11
cd YOLO11
# 安装依赖
pip install -r requirements.txt
# 快速推理
yolo predict model=yolo11n.pt source=0 # 摄像头实时检测
结论与建议
YOLO11通过C3K2模块、动态卷积等创新技术,在参数减少22%的情况下实现精度反超,为实时目标检测树立新标杆。对于开发者而言:
- 边缘场景优先选择n/s版本,平衡性能与资源消耗
- 工业质检推荐m/l版本,利用旋转框检测提升复杂形态目标识别
- 多任务场景可探索seg/pose模型,实现检测-分割-姿态估计一体化
随着模型效率的持续提升,YOLO11有望在智能监控、自动驾驶、AR交互等领域加速落地,推动计算机视觉技术向更广泛的边缘设备渗透。
点赞+收藏+关注,获取YOLO11最新实战教程与优化技巧,下期将带来《YOLO11工业质检实战:从数据标注到模型部署》。
 atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust0152
atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust0152- DDeepSeek-V4-ProDeepSeek-V4-Pro(总参数 1.6 万亿,激活 49B)面向复杂推理和高级编程任务,在代码竞赛、数学推理、Agent 工作流等场景表现优异,性能接近国际前沿闭源模型。Python00
 LongCat-Video-Avatar-1.5最新开源LongCat-Video-Avatar 1.5 版本,这是一款经过升级的开源框架,专注于音频驱动人物视频生成的极致实证优化与生产级就绪能力。该版本在 LongCat-Video 基础模型之上构建,可生成高度稳定的商用级虚拟人视频,支持音频-文本转视频(AT2V)、音频-文本-图像转视频(ATI2V)以及视频续播等原生任务,并能无缝兼容单流与多流音频输入。00
LongCat-Video-Avatar-1.5最新开源LongCat-Video-Avatar 1.5 版本,这是一款经过升级的开源框架,专注于音频驱动人物视频生成的极致实证优化与生产级就绪能力。该版本在 LongCat-Video 基础模型之上构建,可生成高度稳定的商用级虚拟人视频,支持音频-文本转视频(AT2V)、音频-文本-图像转视频(ATI2V)以及视频续播等原生任务,并能无缝兼容单流与多流音频输入。00 auto-devAutoDev 是一个 AI 驱动的辅助编程插件。AutoDev 支持一键生成测试、代码、提交信息等,还能够与您的需求管理系统(例如Jira、Trello、Github Issue 等)直接对接。 在IDE 中,您只需简单点击,AutoDev 会根据您的需求自动为您生成代码。Kotlin03
auto-devAutoDev 是一个 AI 驱动的辅助编程插件。AutoDev 支持一键生成测试、代码、提交信息等,还能够与您的需求管理系统(例如Jira、Trello、Github Issue 等)直接对接。 在IDE 中,您只需简单点击,AutoDev 会根据您的需求自动为您生成代码。Kotlin03 Intern-S2-PreviewIntern-S2-Preview,这是一款高效的350亿参数科学多模态基础模型。除了常规的参数与数据规模扩展外,Intern-S2-Preview探索了任务扩展:通过提升科学任务的难度、多样性与覆盖范围,进一步释放模型能力。Python00
Intern-S2-PreviewIntern-S2-Preview,这是一款高效的350亿参数科学多模态基础模型。除了常规的参数与数据规模扩展外,Intern-S2-Preview探索了任务扩展:通过提升科学任务的难度、多样性与覆盖范围,进一步释放模型能力。Python00 skillhubopenJiuwen 生态的 Skill 托管与分发开源方案,支持自建与可选 ClawHub 兼容。Python0112
skillhubopenJiuwen 生态的 Skill 托管与分发开源方案,支持自建与可选 ClawHub 兼容。Python0112
