推荐开源项目:Tapster - 移动自动化机器人
1、项目介绍
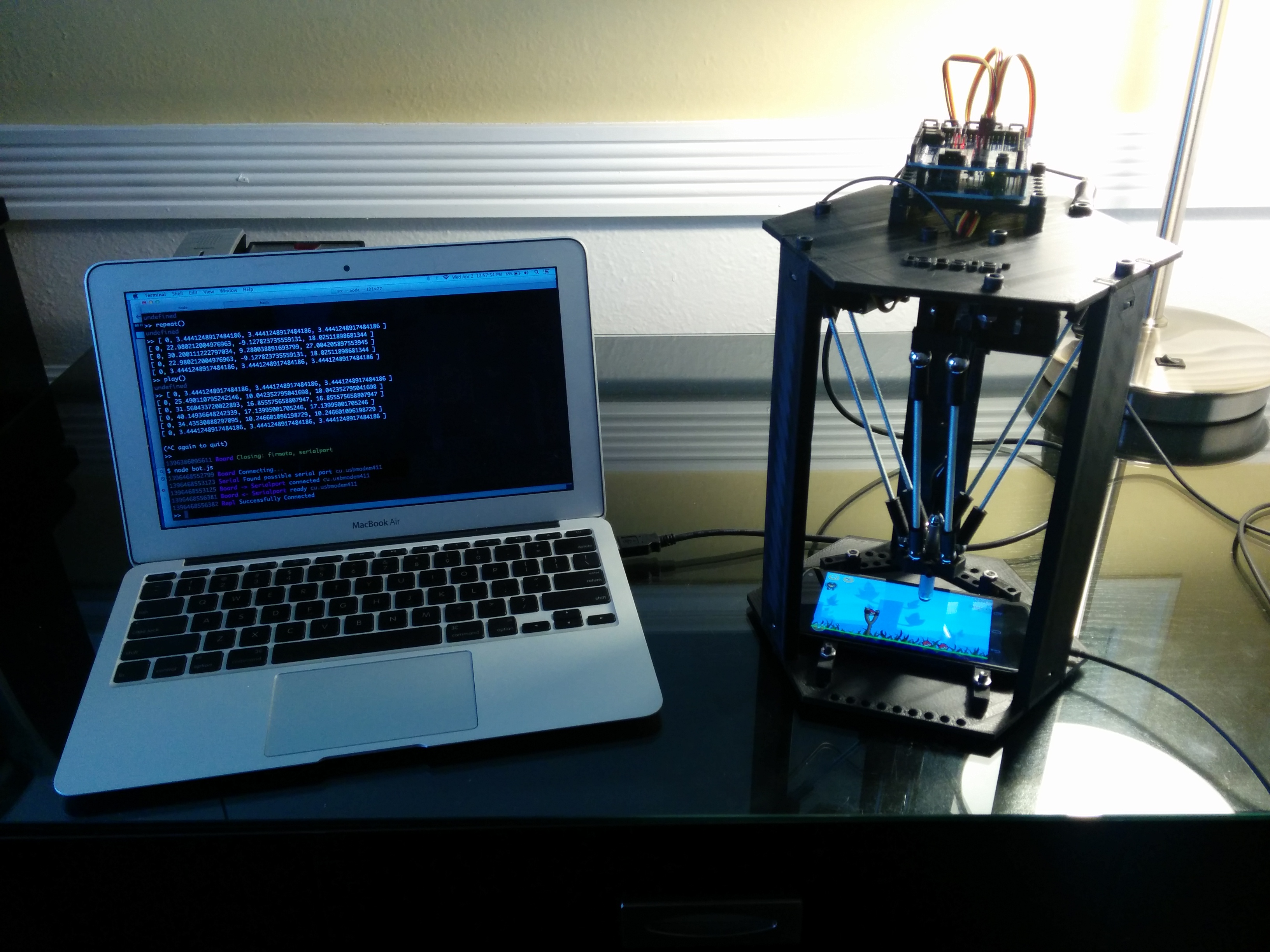
Tapster是一个创新的开源项目,它将一个物理机器人与Node.js环境相结合,实现了对移动设备的自动化操作。想象一下,这个小巧的机器人可以模拟人类的手指,在你的手机或平板上进行点击、滑动等动作,为开发者和测试人员提供了一种全新的移动应用自动化测试工具。
2、项目技术分析
Tapster的核心依赖于以下两个关键技术:
-
Node.js:这是一个轻量级且高效的JavaScript运行环境,用于编写控制机器人的后台逻辑。通过Node.js,开发人员可以利用其强大的异步I/O处理能力和丰富的生态系统来实现复杂的控制流程。
-
Arduino:作为硬件平台的基础,Tapster连接到Arduino板以接收来自软件的指令,并将其转化为机械动作。在Arduino上,你需要安装Firmata脚本,这是一种允许Arduino与各种编程语言通信的标准协议。
项目设置过程简单明了,包括下载Arduino客户端,上传Firmata脚本,以及安装Node.js依赖项。一旦完成这些步骤,你可以通过简单的JavaScript命令如dance()和go(0,0,-140)控制Tapster的动作。
3、项目及技术应用场景
-
自动化测试:开发者可以编写脚本来模拟用户的各种交互行为,例如点击按钮、填写表单,从而提高测试效率并减少人为错误。
-
教学演示:在讲解移动应用开发时,教师可以让Tapster实时展示代码如何影响应用程序的行为。
-
创意实验:对于喜欢探索新事物的技术爱好者,Tapster提供了无限的可能性。你可以尝试用它来创建互动装置或是有趣的艺术项目。
4、项目特点
-
易用性:只需几步简单的配置,就可以让Tapster投入工作,对新手友好。
-
灵活性:基于Node.js的API使得控制机器人变得灵活而直观,允许快速编写和迭代测试脚本。
-
扩展性:作为一个开放源代码项目,Tapster欢迎社区成员贡献新的功能,使其不断进化和适应更多场景。
总的来说,Tapster是一个极具潜力的开源项目,它结合了硬件与软件的优势,为移动设备的自动化操作带来了全新的解决方案。无论你是专业的开发者还是好奇的业余爱好者,都值得尝试一下这个有趣的小机器人。现在就加入Tapster的世界,释放你的创新能量吧!
 atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust0152
atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust0152- DDeepSeek-V4-ProDeepSeek-V4-Pro(总参数 1.6 万亿,激活 49B)面向复杂推理和高级编程任务,在代码竞赛、数学推理、Agent 工作流等场景表现优异,性能接近国际前沿闭源模型。Python00
 LongCat-Video-Avatar-1.5最新开源LongCat-Video-Avatar 1.5 版本,这是一款经过升级的开源框架,专注于音频驱动人物视频生成的极致实证优化与生产级就绪能力。该版本在 LongCat-Video 基础模型之上构建,可生成高度稳定的商用级虚拟人视频,支持音频-文本转视频(AT2V)、音频-文本-图像转视频(ATI2V)以及视频续播等原生任务,并能无缝兼容单流与多流音频输入。00
LongCat-Video-Avatar-1.5最新开源LongCat-Video-Avatar 1.5 版本,这是一款经过升级的开源框架,专注于音频驱动人物视频生成的极致实证优化与生产级就绪能力。该版本在 LongCat-Video 基础模型之上构建,可生成高度稳定的商用级虚拟人视频,支持音频-文本转视频(AT2V)、音频-文本-图像转视频(ATI2V)以及视频续播等原生任务,并能无缝兼容单流与多流音频输入。00 auto-devAutoDev 是一个 AI 驱动的辅助编程插件。AutoDev 支持一键生成测试、代码、提交信息等,还能够与您的需求管理系统(例如Jira、Trello、Github Issue 等)直接对接。 在IDE 中,您只需简单点击,AutoDev 会根据您的需求自动为您生成代码。Kotlin03
auto-devAutoDev 是一个 AI 驱动的辅助编程插件。AutoDev 支持一键生成测试、代码、提交信息等,还能够与您的需求管理系统(例如Jira、Trello、Github Issue 等)直接对接。 在IDE 中,您只需简单点击,AutoDev 会根据您的需求自动为您生成代码。Kotlin03 Intern-S2-PreviewIntern-S2-Preview,这是一款高效的350亿参数科学多模态基础模型。除了常规的参数与数据规模扩展外,Intern-S2-Preview探索了任务扩展:通过提升科学任务的难度、多样性与覆盖范围,进一步释放模型能力。Python00
Intern-S2-PreviewIntern-S2-Preview,这是一款高效的350亿参数科学多模态基础模型。除了常规的参数与数据规模扩展外,Intern-S2-Preview探索了任务扩展:通过提升科学任务的难度、多样性与覆盖范围,进一步释放模型能力。Python00 skillhubopenJiuwen 生态的 Skill 托管与分发开源方案,支持自建与可选 ClawHub 兼容。Python0112
skillhubopenJiuwen 生态的 Skill 托管与分发开源方案,支持自建与可选 ClawHub 兼容。Python0112
