探索无限可能:Open Optimal Control Library
2024-05-20 16:02:05作者:伍霜盼Ellen
在人工智能和自动化领域,优化控制算法已经成为了解决复杂问题的关键工具。为此,我们自豪地向您推荐Open Optimal Control Library(OpenOCL),一个开源的最优控制库,它为研究人员和开发者提供了强大且灵活的工具。
项目介绍
OpenOCL是一个专门设计用于解决连续时间动态系统最优化问题的软件包。它包含了多种模型,如机器人学和空中风能应用,提供了一套直观易用的接口,允许用户快速实现复杂的控制策略。项目网页上可以找到详细的文档、示例代码以及下载链接,帮助您快速入门并深入探索。
项目技术分析
OpenOCL的核心在于其高效求解器,能够处理非线性动态系统的最优控制问题。它支持各种控制理论,包括直接多重 Shooting 方法和自适应Collocation方法。此外,库中的API设计简洁明了,使得集成到现有项目中变得简单易行。
应用场景
OpenOCL适用于广泛的工程和科学应用:
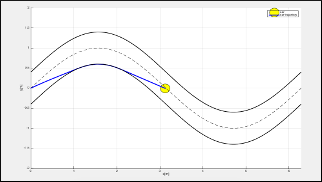
- 机器人学:从倒立摆到更复杂的多关节机械臂控制。
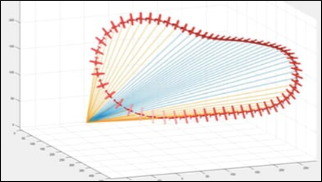
- 空中风能:对无人机和风力发电机进行路径规划与控制优化。
- 其他动态系统:例如车辆动力学或电路系统的优化控制等。
通过实例化的模型,OpenOCL可以帮助研究人员快速验证新理论,而工程师则可以利用这些工具来提升产品的性能和效率。
项目特点
- 开源免费:基于MIT许可证,任何人都可以自由使用、复制、修改和分发。
- 易用性强:提供详细的文档和示例代码,使得学习曲线平缓。
- 灵活性高:支持多种最优化算法,可适应不同规模和类型的动态控制系统。
- 社区活跃:鼓励用户参与贡献,持续改进和扩展功能。
要开始您的OpenOCL之旅,请访问官方网站下载工具箱,查阅API文档,并尝试运行提供的示例代码。如果您有任何疑问,或者想要参与到项目中,欢迎按照贡献指南操作。
最后,如果您觉得OpenOCL对您的工作有所帮助,别忘了给予星标支持,并考虑引用我们的研究成果。让我们共同推进最优控制领域的边界!
许可证信息和其他法律事项可在项目GitHub仓库的LICENSE文件中查看。如果您有任何问题,欢迎通过info [at] openocl.org联系我们。
一起探索无限可能,用OpenOCL开启你的最优控制实践之旅!
登录后查看全文

相关内容推荐
热门项目推荐
 atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust099
atomcodeClaude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed. Get StartedRust099- DDeepSeek-V4-ProDeepSeek-V4-Pro(总参数 1.6 万亿,激活 49B)面向复杂推理和高级编程任务,在代码竞赛、数学推理、Agent 工作流等场景表现优异,性能接近国际前沿闭源模型。Python00
 MiMo-V2.5-ProMiMo-V2.5-Pro作为旗舰模型,擅⻓处理复杂Agent任务,单次任务可完成近千次⼯具调⽤与⼗余轮上 下⽂压缩。Python00
MiMo-V2.5-ProMiMo-V2.5-Pro作为旗舰模型,擅⻓处理复杂Agent任务,单次任务可完成近千次⼯具调⽤与⼗余轮上 下⽂压缩。Python00 GLM-5.1GLM-5.1是智谱迄今最智能的旗舰模型,也是目前全球最强的开源模型。GLM-5.1大大提高了代码能力,在完成长程任务方面提升尤为显著。和此前分钟级交互的模型不同,它能够在一次任务中独立、持续工作超过8小时,期间自主规划、执行、自我进化,最终交付完整的工程级成果。Jinja00
GLM-5.1GLM-5.1是智谱迄今最智能的旗舰模型,也是目前全球最强的开源模型。GLM-5.1大大提高了代码能力,在完成长程任务方面提升尤为显著。和此前分钟级交互的模型不同,它能够在一次任务中独立、持续工作超过8小时,期间自主规划、执行、自我进化,最终交付完整的工程级成果。Jinja00 Kimi-K2.6Kimi K2.6 是一款开源的原生多模态智能体模型,在长程编码、编码驱动设计、主动自主执行以及群体任务编排等实用能力方面实现了显著提升。Python00
Kimi-K2.6Kimi K2.6 是一款开源的原生多模态智能体模型,在长程编码、编码驱动设计、主动自主执行以及群体任务编排等实用能力方面实现了显著提升。Python00 MiniMax-M2.7MiniMax-M2.7 是我们首个深度参与自身进化过程的模型。M2.7 具备构建复杂智能体应用框架的能力,能够借助智能体团队、复杂技能以及动态工具搜索,完成高度精细的生产力任务。Python00
MiniMax-M2.7MiniMax-M2.7 是我们首个深度参与自身进化过程的模型。M2.7 具备构建复杂智能体应用框架的能力,能够借助智能体团队、复杂技能以及动态工具搜索,完成高度精细的生产力任务。Python00

最新内容推荐
跨系统应用融合:APK Installer实现Windows环境下安卓应用运行的技术路径探索如何用OpCore Simplify构建稳定黑苹果系统?掌握这3大核心策略ComfyUI-LTXVideo实战攻略:3大核心场景的视频生成解决方案告别3小时抠像噩梦:AI如何让人人都能制作电影级视频Anki Connect:知识管理与学习自动化的API集成方案Laigter法线贴图生成工具零基础实战指南:提升2D游戏视觉效率全攻略如何用智能助手实现高效微信自动回复?全方位指南3步打造高效游戏自动化工具:从入门到精通的智能辅助方案掌握语音分割:从入门到实战的完整路径开源翻译平台完全指南:从搭建到精通自托管翻译服务

项目优选
收起
暂无描述
Dockerfile
710
4.51 K
Claude Code 的开源替代方案。连接任意大模型,编辑代码,运行命令,自动验证 — 全自动执行。用 Rust 构建,极致性能。 | An open-source alternative to Claude Code. Connect any LLM, edit code, run commands, and verify changes — autonomously. Built in Rust for speed.
Get Started
Rust
578
99
本项目是CANN提供的数学类基础计算算子库,实现网络在NPU上加速计算。
C++
958
955
deepin linux kernel
C
28
16
🎉 (RuoYi)官方仓库 基于SpringBoot,Spring Security,JWT,Vue3 & Vite、Element Plus 的前后端分离权限管理系统
Vue
1.61 K
942
Ascend Extension for PyTorch
Python
573
694
🍒 Cherry Studio 是一款支持多个 LLM 提供商的桌面客户端
TypeScript
1.43 K
116
openEuler内核是openEuler操作系统的核心,既是系统性能与稳定性的基石,也是连接处理器、设备与服务的桥梁。
C
414
339
暂无简介
Dart
952
235
Nop Platform 2.0是基于可逆计算理论实现的采用面向语言编程范式的新一代低代码开发平台,包含基于全新原理从零开始研发的GraphQL引擎、ORM引擎、工作流引擎、报表引擎、规则引擎、批处理引引擎等完整设计。nop-entropy是它的后端部分,采用java语言实现,可选择集成Spring框架或者Quarkus框架。中小企业可以免费商用
Java
12
2